
2025-2026 Season: Unearthed
- katenthibodeau
- May 5
- 5 min read
Updated: May 7
Robotics is not just about building machines; it’s about fostering creativity, problem-solving, and teamwork among young minds. For teams participating in the First Lego League (FLL), the challenge is to create innovative solutions that address real-world problems using robotics. This year, the theme was Archaeological based: Unearthed.
Robot Design
The mistake we made most recently with the robot design was thinking we could make a longer driving base with only 13 days until competition. We couldn’t get it done and reverted back to our 4th iteration with TWO changes:
Heavier components are over the drive wheels which allow for more traction
Instead of wheels or casters we have two “ball pegs” in the front to make sure the robot doesn’t tip and to create less friction.
Attachments
We learn more about coding and our robot design from attachments we had to discard –
Forlkift-we attempted to use this forklift for mission 2, 3, 7 and 10 because a forklift mechanism looked like it could work for all those missions, making it very efficient. However, it was too tall and did not perform consistently.
Lazy Susan – we called this a Lazy Susan because it has two wheels that rotate in opposite directions from each other. It had consistent success, but took too long to change in between missions
Cage With a Hook – there was a hook attached to a motor that released a cage in order to leave the cage in place after it completed the Topsoil Missions. However, we scrapped it because we could not get the robot to drive a consistent distance with the added weight in the front.
Mistakes aren’t setbacks, they’re part of the process of learning. Throughout it all, our core values have guided us. Teamwork showed up in the way we collaborated to design, build, and code the robot. Inclusiveness shaped every decision, ensuring everyone’s ideas were heard and valued. And of course, we never forgot Fun—from Blooket battles during meetings to our pizza‑and‑cupcake bonding night filled with video games, we made sure the journey was just as enjoyable as the destination.










Programming the Robot
Mission Strategy
Before Qualifiers, we tried more missions per run. Our coding got more complicated.
After Qualifiers, we looked at what other teams posted to YouTube for ideas
We changed our mission strategy to combine different missions for Semi-Finals, combining several missions and separating others.
For qualifiers, our goal was to score 280 points (we scored 240); for semi finals, our goal was to score 350 (we scored 320) and for this competition, our goal is to score 370. We have consistently changed our strategy- learning from our mistakes- to have higher goals.
Coding
Lost code variables: Every time we changed a code, we copied the file, then renamed it, but the variables did not copy over, so it was pretty useless code and we had to start over. This happened every single time we returned from a competition to re strategize. The solution is you have to copy the code file from inside the spike prime app
Driving Straight – Our robot had a tendency to move to the right when trying to go straight. We implemented code that corrects it using gain – the higher the number, the sharper the robot turns back. The lower the number, the less sharp the robot turns back. However, after qualifiers, this was also inconsistent and would often hiccup. We also experimented with changing the relative position of both wheels.
Testing
Used spreadsheets to track progress, timing each run
We ran each mission over 30 times before considering how to change it if needed.
We tested under competition conditions, so the team had practice rotating through all positions
Innovation Project
Research
We based our Innovation Project Challenge on interviews from the American Institute of Archaeology and our own discussions with two archaeologists, a geologist, a technology specialist and the founder/CEO of a drone company.
From our research, we have several takeaways:
· Archaeology faces challenges that require cross-disciplinary solutions. Most archaeologists are not trained in how to operate technology that they may need to do efficient work in the field.
No single global database exists; archaeologists must combine multiple sources, which often takes more time and resources.
Funding is a constant obstacle and technology like LiDAR, GPR and drones are expensive.
Many archaeological sites are hidden by vegetation and are hard to access.
Guiding question: How can we safely and efficiently survey remote, fragile, or inaccessible sites?
Solution and Model
Our solution is drone-based service for archaeologists, biologists, urban planners, and geologists:
Our sensors integrate with existing satellite imagery (e.g., LANDSAT).
The end product is a map that archeologists can use to apply for funding, plan for excavation and develop more theories about human history.

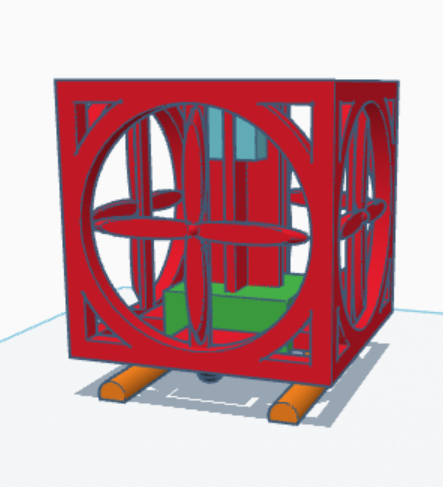
Our design is a 30x30x30 inch cube drone.
It has a carbon fiber body, is strong yet lightweight.
Balanced weight distribution, wind resistant
Equipped with LiDAR, GPR, and camera and 2 TB of onboard storage
There is a gyroscope so users can adjust for antenna orientation while in flight
Our prototype will operate for 10 minutes flight time with the option to build out to 3 hours of battery life.
We got feedback from industry leaders that said we should use GPS tags to mark important locations.
“Home” setting ensures safe return if contact is lost.
Collision-avoidance system prevents crashes.
It will actually fly! With 4 motors providing 7kg of thrust each – for a total of 28kg – our 15 kg drone has enough thrust to exceed it weight and lift off the ground.
Components
We will have planned flight paths – setting up a grid with specific parameters so scientists can choose where the drone surveys.
Our drone has three main sensors: LiDAR, GPR and a camera.
LiDAR = laser pulses measure distances, can penetrate vegetation. Our drone’s LiDAR can scan from the air up to 60 meters high
LiDAR revealed 12 new sites in Peru (2024–25) and 60,000 sites in Guatemala. In both cases, LIDAR was an important technology because LIDAR can be tuned to go through dense leaves and other foliage. Our drone can scan using LiDAR up to 60 meters high
GPR = radio waves detect underground anomalies. Our drone’s GPR can scan up to 20 meters deep when flying close to the ground.
We will have swappable sensors for GPR based on what depth or resolution the user requests
We realize that using a drone and LiDAR/GPR technology will not allow for the detection of sites without built structures like caves and underwater sites. Also, because our sensors do not detect things like stone tools, our service will miss much older sites where no iron or metal tools exist. This highlights the need for multidisciplinary efforts.
Simulation
We created a simulation using python that takes data from sensors and creates a 3D model of what the drone data would look like in map form.
The next step is to import point cloud data from existing open source LiDAR scans and import it into the simulation.
Feedback from industry leaders indicated that it was extremely important for our users to be able to see data live, so we will implement that in our next round of prototyping

We met with local drone company, Precision Agritech, to discuss or business model and get feedback.

We used the Core Values of discovery by researching the components necessary to create a drone and mapping service and used impact by reaching out to a wide range of industry leaders and potential users of our proposed technology, gathering diverse insights to better understand the challenge we aim to solve. Through this teamwork, we combined creative thinking with real‑world feedback, allowing us to refine our ideas and develop a meaningful, practical solution to the problem.
Competition!
Qualifiers: Innovation Project Award
Semifinals: Motivate Award
Made it to the Western Washington State Competition!


Comments